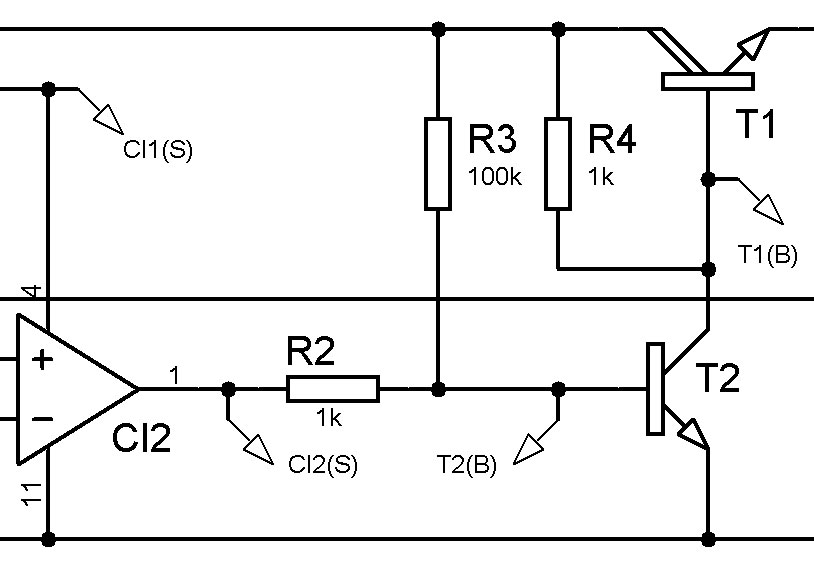
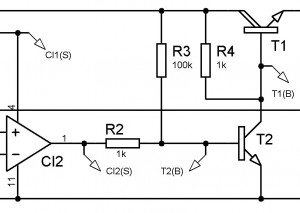
Nous vous proposons des exercices en forme d’énigme. Un montage en panne que vous devez réparer. A l’aide d’un tableau de relevé des mesures en divers points du montage, trouver le ou les composants défectueux.
L’université Montpellier 2 à la conquête de l’espace
12 mai 2011
Suite des aventures du satellite Robusta.
Parmi les différentes phases de validation du satellite, vient aujourd’hui la dernière phase de test. Il s’agit de la communication entre le satellite et la station au sol. Ce projet a été nommé TRacball.
Ce 12 mai 2011, lors de la journée Tracball du 12 mai, un ballon stratosphérique a été lancé depuis le campus triolet de l’Université Montpellier 2. Il a emporté le satellite ROBUSTA jusqu’à 30 km d’altitude en direction de la Camargue. Pendant son vol, il a été suivi en direct sur écran géant sur le spatio-bus du CNES. En raison d’une météo plus favorable, la ballon a éclaté au dessus des terres et non au dessus de la mer. Ce test est donc le dernier avant que ROBUSTA ne soit embarqué sur le nouveau lanceur Européen VEGA, en fin d’année, pour prendre son envol et assurer sa mission.
Les étudiants des départements GEII et GMP ayant participé à cette dernière phase présenteront leur travaux après le lancement du ballon (voir planning de la journée).
Voici un petit exercice pour s’entrainer à réaliser une carte avec des composants CMS.
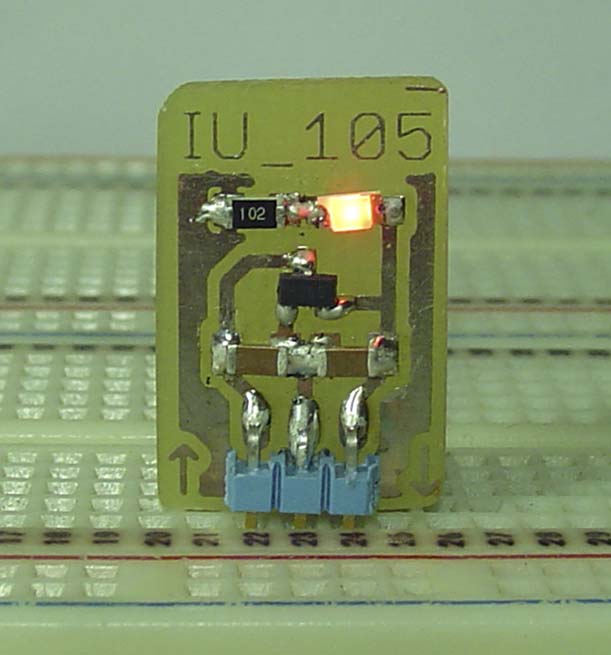
Cette petite carte permet de réaliser une régulation de tension 3,3V ou 5V. En plus du régulateur, on y trouve les deux condensateurs de stabilité et un indicateur à del rouge ou verte. Le composant choisi est un MCP1702. Ce composant remplacera avantageusement le classique 78L05.
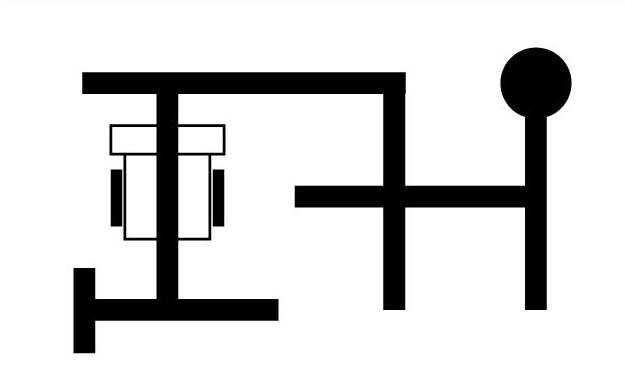
Cette carte permettra de remplacer les divers composants nécessaires pour réaliser une régulation de tension sur une plaque d’essai. Ce module s’utilise comme un régulateur trois broches classique avec un indicateur de présence de la tension de sortie. L’entrée non régulée est à gauche (indiquée par la flèche entrante), la sortie régulée à droite (indiquée par la flèche sortante) et la masse au centre.
Cette semaine était donc consacrée à tout ce qui touche à la robotique et prouve l’importance de la robotique comme un des piliers du XXIème siècle pour l’innovation. La robotique est un exemple extraordinaire pour sa capacité à déclencher l’imagination chez les plus jeunes, mais pas seulement. Cette capacité à développer l’intérêt scientifique fait de la robotique une plateforme pédagogique idéale pour les sciences, la technologie, l’ingénierie et les mathématiques.
Dans toute manifestation robotique qui se respecte, il y a une compétition qui est organisée par une société concernée par le thème. Cette année, c’était la coupe Freescale qui a réuni des étudiants du monde entier. L’objectif était de réaliser un robot suiveur de ligne le plus rapide possible, grand classique des tournois de robotique, permettant aux plus grand nombre de participer. La Freescale Cup était supportée par la communauté internet: StreetSmarts. StreetSmarts comprend plus de 700 membres, et possède de nombreuses vidéos des coupes précédentes.
la 2ème partie du projet va consister à réaliser une plateforme mobile de type différentielle à deux moteurs capable de suivre une ligne noire sur fond blanc.
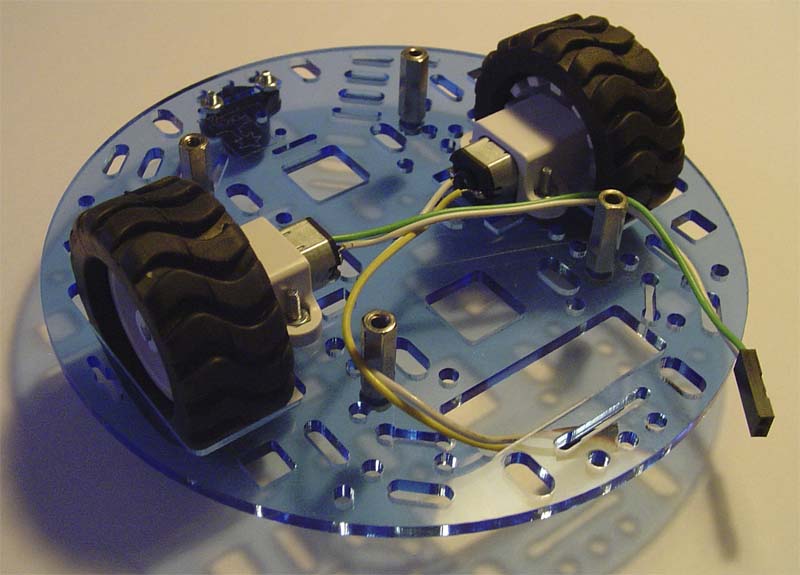
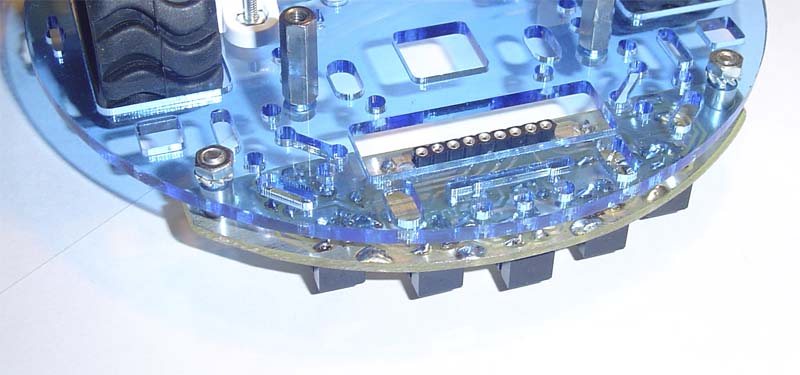
La partie mécanique est un châssis de marque Pololu réf : RRC04A. Il est fourni avec deux moto-réducteurs 1/30, deux roues 42mm de diamètre et un roue folle. Une fenêtre à l’avant du robot nous permet de placer la carte capteurs.
Dans cette 2ème partie, il faut câbler un robot suiveur de ligne et réaliser une carte mère le robot labyrinthe, sans oublier la programmation de l’ensemble.
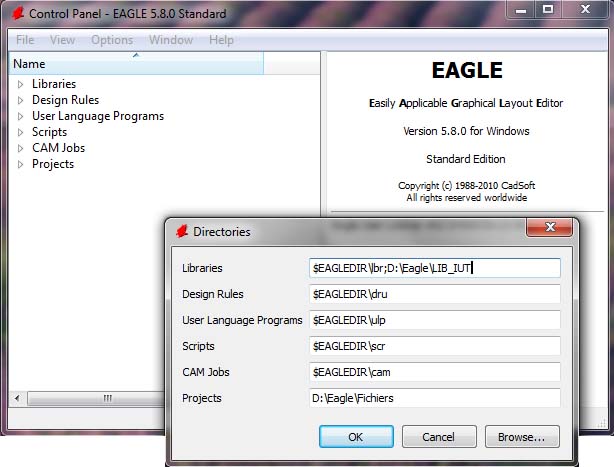
Carte mère, fichier *.scr pour Eagle : LMR_2011.zip Ce fichier est à décompacter et à lancer (commande SCR, Script) lorsque le schéma de la carte mère est fini et lorsque vous passerez sur Board pour dessiner les pistes. Voir en pages Eagle, pour utiliser les scripts.
Chassis nu
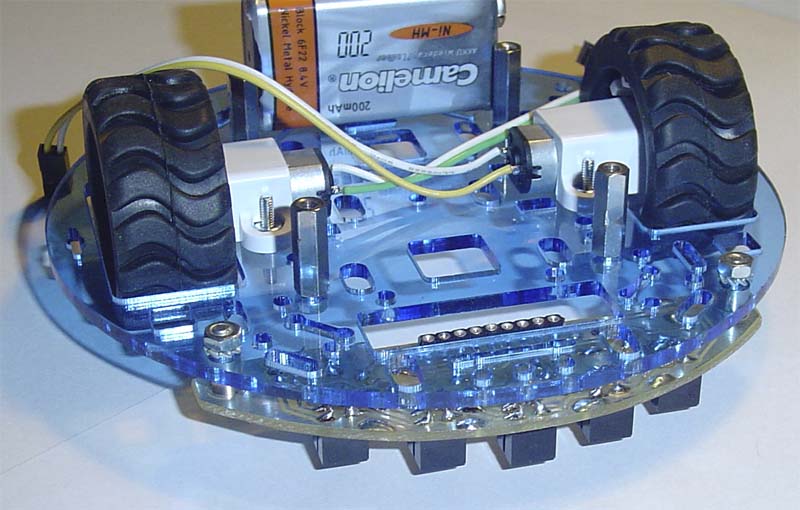
Moteurs cablés
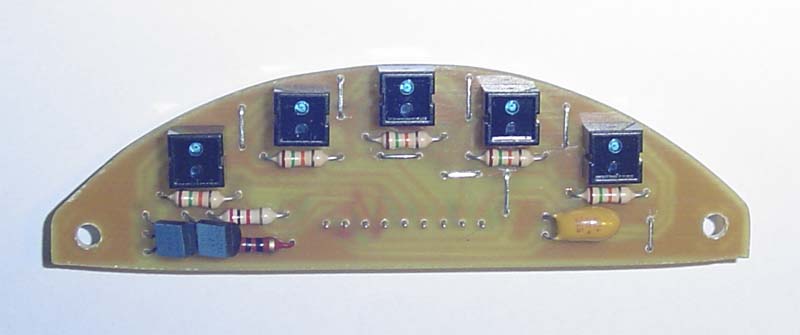
Carte Capteurs
Le connecteur de la carte capteurs
la carte capteurs à l’avant
Le support LabDec bloque l’accumulateur 9V
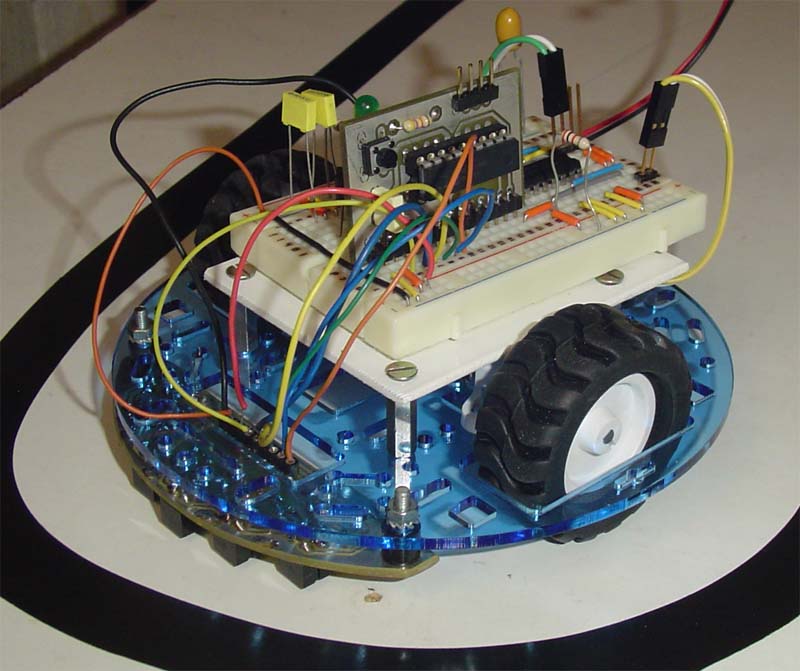
Implantation sur plaque d’essai
Plaque d’essai installée
Nous avons commencé par monter la base du robot avec la plaque principale, les deux moto réducteurs, les deux roues et la roue folle à l’arrière. Puis nous avons soudé deux fils d’une dizaine de cm sur chacun des moteurs avec un connecteur femelle standard. La carte capteurs a été réalisée et testée avant d’être fixée à l’avant du montage. Le connecteur est accessible par un large fenêtre à l’avant du châssis.
La plaque d’essai va nous permettre de tester le fonctionnement du robot en suiveur de ligne, avec trois capteurs seulement, (voir vidéo: Suiveur_Ligne_01).
Les premiers essais sont encourageants. Mais il faut absolument disposer d’un accu pleinement chargé au risque de modifier inutilement les réglages des vitesses dans les virages.
Une nouvelle série de documents pour apprendre à utiliser cet excellent logiciel. Pour commencer, deux documents pour démarrer : un premier document pour comprendre le fonctionnement du panneau de configuration ( Control Panel). Puis un deuxième document sur l’utilisation des scripts, ces petits fichiers texte qui paramètrent le logiciel ou qui exécutent des commandes Eagle.
Pendant le second semestre 2010/2011, les étudiants de 1ère année du département G.E.I.I. de l’IUT de Nîmes vont travailler sur un projet de type A.P.P., Apprentissage par Problèmes et Projets. Le thème choisi est la réalisation d’un robot de type suiveur de ligne pour le tournoi de robotique de Nîmes 2011. Ce tournoi aura lieu au lycée Alphonse Daudet les 20 et 21 mai 2011.
Un ensemble de document sera distribué ou disponible sur ce site à la page Projets.
Un nouveau thème est ajouté au tournoi national de robotique de Nîmes. Il s’agit de robots devant parcourir un labyrinthe dessiné par une ligne noire sur fond blanc. Le robot doit être de type suiveur de ligne. On ajoutera un algorithme de résolution de labyrinthe de type main droite ou main gauche.
Afin de mener à bien ce projet, nous vous proposons quelques éléments de réflexion, divers documents et liens.
Structure d’un robot suiveur de ligne :
Avant d’aboutir au résultat espéré, voici quelques étapes nécessaires.
Synoptique :
Ce document permet d’illustrer la structure d’un robot type suiveur de ligne. 5 fonctions principales sont nécessaires pour former notre structure. Les 3 premières fonctions sont triviales, voir même la fonction alimentation, mais pourquoi ajouter une Interface Homme machine. On suppose qu’une fois programmé, il n’y a pas lieu d’avoir un dialogue entre le robot et une console. Pourtant, un dialogue régulier est un moyen d’améliorer le programme et une interface PC bien programmé permet de mettre en évidence des anomalies à corriger mais aussi de percevoir les limites du système. C’est donc un bon moyen pour synthétiser l’étude et progresser dans la réflexion pour aller de l’avant.
Avant de passer à la réalisation de la première phase, un ensemble de documents sont nécessaires, comme des TPs sur les composants utilisés et les fiches techniques de ces mêmes composants et un planning du travail à effectuer.
Planning : ce document donne une estimation de l’organisation dans le temps et le temps réel mis par les plus rapides et ceux qui sont ne retard.
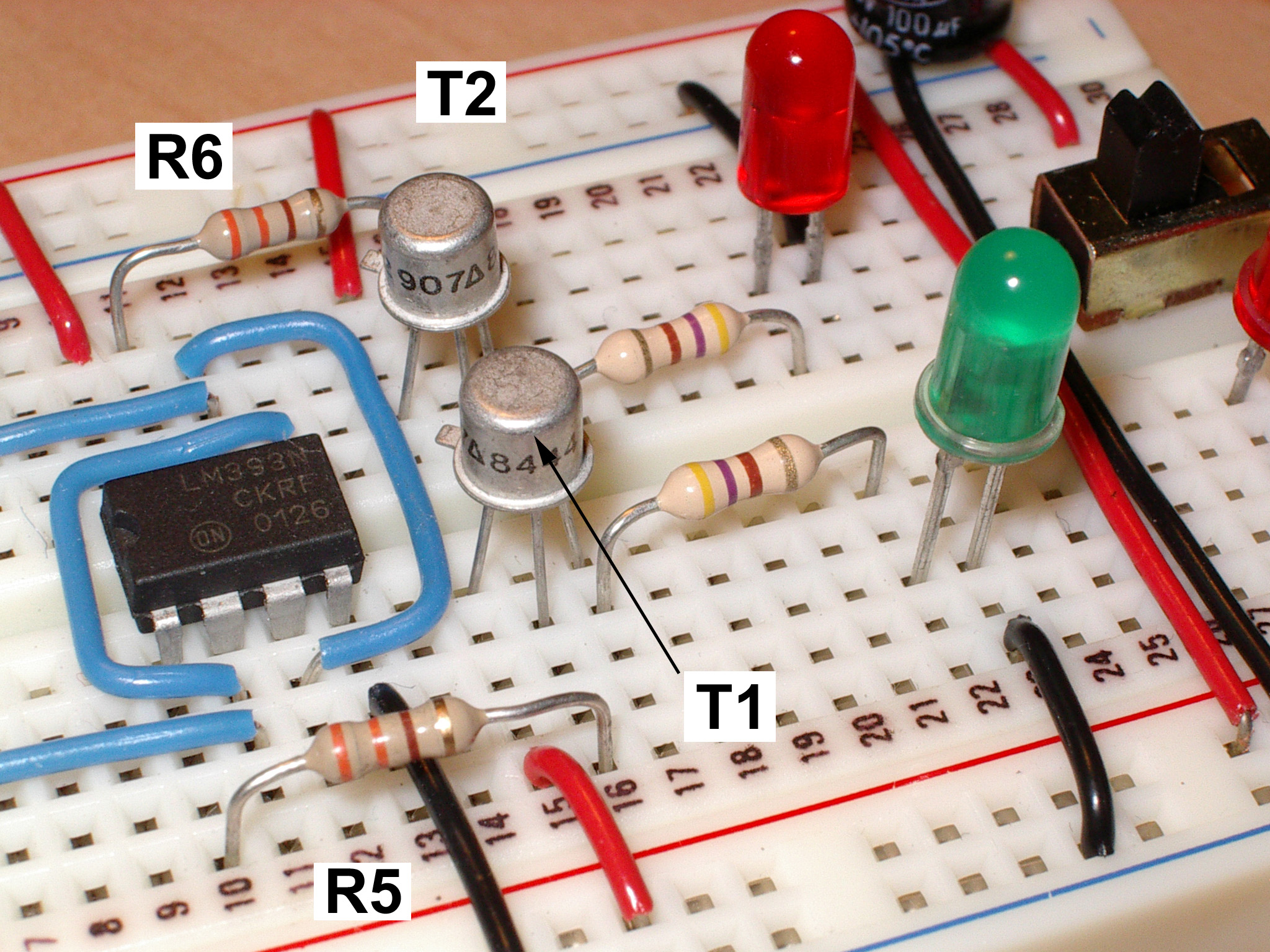
La plaquette d’essai est un élément indispensable pour découvrir l’électronique et d’une manière générale pour tester un montage. Il existe plusieurs versions de tailles différentes.
Ce support permet de relier les divers composants d’un schéma afin de vérifier son bon fonctionnement ou pour trouver rapidement les bonnes valeurs des composants passifs.
Une bonne habitude consiste à utiliser des fils rigides de couleurs différentes pour chaque catégories de signaux. Comme par exemple, les couleurs rouge et noire pour les signaux d’alimentation.
Dans cette page, nous allons décrire comment réaliser une application autour d’un microcontrôleur PIC. Nous avons choisi le µC 16F88 de Microchip pour des raisons de pédagogie dans notre département.
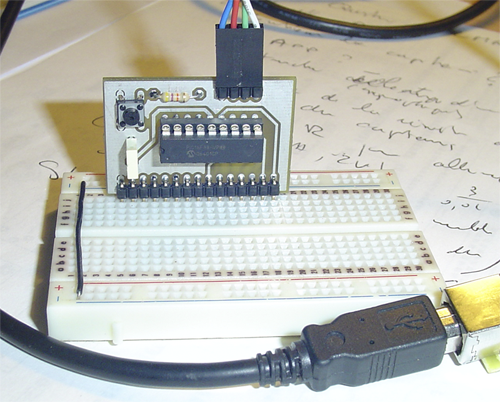
Afin de développer des applications utilisant un microcontrôleur 16F88 dans de bonnes conditions, nous avons développé une carte très simple pouvant être planté dans un plaque d’essai de type labDec. La carte est programmable par un port série ou un port série virtuel (USB).
Cette carte pour microcontrôleur 16F88 de Microchip est la version améliorée d’une carte ayant servi à un projet de robot mini sumo en 2009/2010.
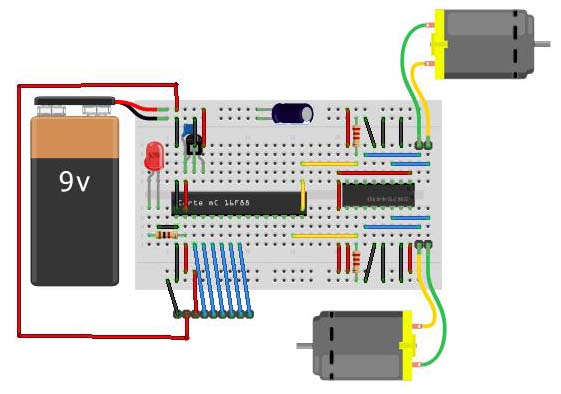
Schéma de mise en œuvre du projet : Dans un premier temps, vous devez dessiner le schéma du montage autour de votre µC, en tenant compte des restrictions de la carte (Certaines lignes du µC sont réservées).
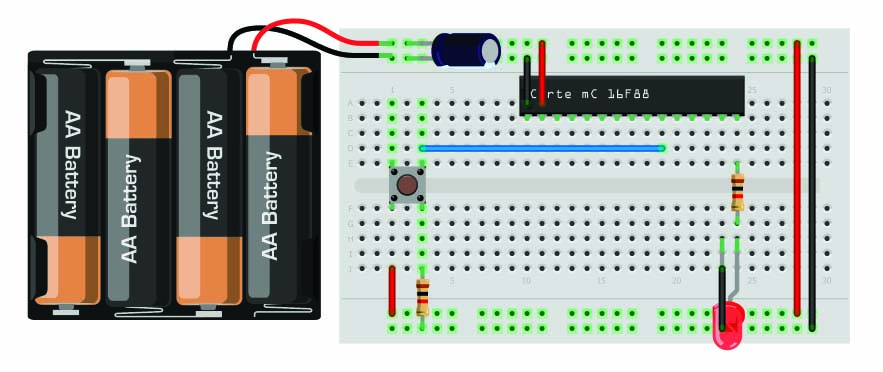
Cette image, réalisée avec le logiciel gratuit Fritzing, permet de visualiser l’implantation des divers composants sur la platine d’essai. Cliquez sur l’image pour l’agrandir.
La carte à µC 16F88 est implantée au milieu et alimentée par ses broches 1 et 2, respectivement sur la masse et le plus. Sur cette image, l’alimentation est réalisée à partir de 4 piles, mais une alimentation régulée 5Volts sera le mieux. La del rouge est sa résistance de limitation sont branchées sur RB7. Le bouton poussoir et sa résistance de tirage à ,l’état bas sont branchés sur RB0. On a ajouté un condensateur pour améliorer la qualité de la tension, si la source est éloignée du montage.
Programmation du µC 16F88 : Pour programmer le µC de la carte, nous vous proposons d’utiliser l’environnement de développement intégré MPLAB avec un compilateur C. Les fichiers de base pour programmer divers PIC sont donnés à la page MPLAB + Compilateur.
Le programme choisi pour cette application est disponible avec les autres sous le nom : Exo_01.c
Ensuite, il faut lancer l’application MPLAB, créer un nouveau projet avec Project Wizard. Ensuite, il faut choisir le composant à programmer, ici c’est un 16F88. Puis le langage de programmation, pour nous, cela sera CCS C Compiler.Ensuite encore, choisir un répertoire de travail et un nom de projet. Et pour finir ajouter le fichier Exo_01.c dans la fenêtre de droite. Si le fichier n’est pas présent dans le répertoire, il faudra changer la lettre A en C, en cliquant sur la lettre.
Des fenêtres apparaissent. Compiler le programme avec l’icône Build ou Make Project. Si tout va bien, un fichier .hex a été créé et peut être transférer dans le µC 16F88.
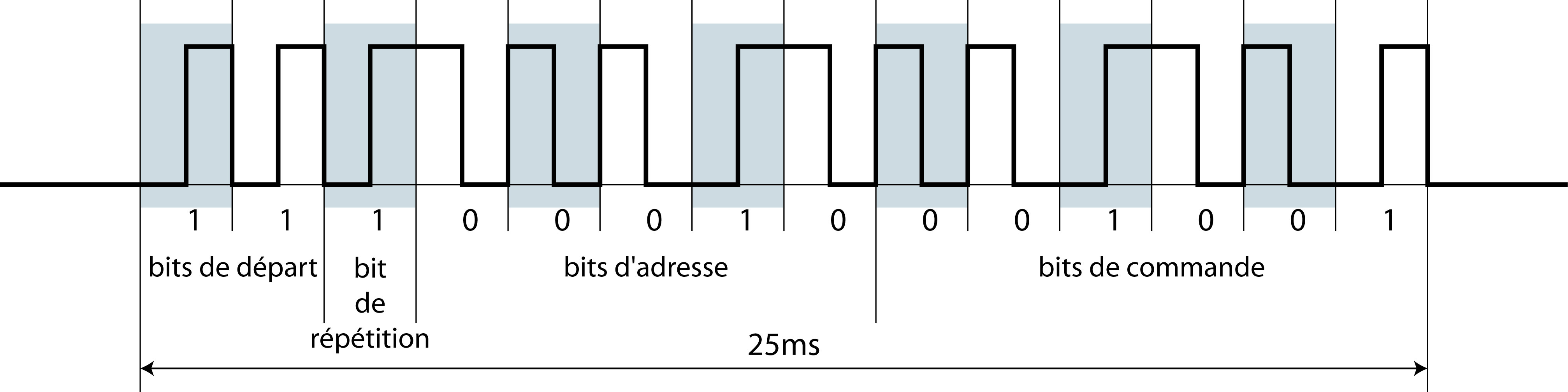
Voici un composant RC5 pour Flowcode PIC, il s’agit d’un composant utilisateur car Flowcode n’a pas encore inclus cette fonction. Cela sera fait pour la prochaine version, d’après les ingénieurs de chez Matrix Multimedia.
Le fichier PIC_Custom.c doit remplacé celui qui est dans le répertoire Components de Flowcode. L’ancien peut être sauvegardé sous un autre nom.
Ce composant a été paramétré pour un PIC cadencé à 8MHz avec le récepteur IR sur l’entrée RB0. Si vous souhaitez une autre horloge, il faut recalculer les valeurs des tempos et le pré-diviseur du timer0.
Pour utiliser la fonction RC5 en décodage, il faut d’abord valider la fonction RC5_RX_Enable.
Puis dans une boucle, lire la fonction RC5_CheckRX que l’on enregistre dans une variable.
Enfin, en fonction du résultat de la fonction précédente, 0 ou 1, lire le code ou l’adresse de la télécommande RC5, avec la fonction RC5_Collect_Data (type, valeur). La valeur est le code si type = 0 ou l’adresse si type = 1.
Le code en C de ce composant utilise un algorithme robuste à variables d’états au lieu d’une interruption à intervalles de temps constant. Les infos résultantes, adresse, code et même bit de répétition sont très stables contrairement à l’autre technique.
Par contre, les fonctions TX qui génèrent une émission RC5 n’ont pas été modifiées, il est déconseillé de les utiliser, car elle ne fonctionneront pas.
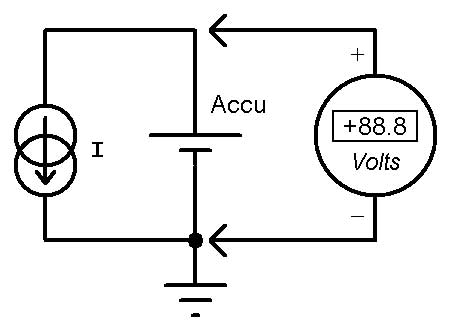
Un capacimètre pour accumulateur permet de mesurer la capacité réelle en mAh d’un accumulateur de type CdNi, NiMH ou encore Li-ion. Cette mesure permet d’apparier les divers accumulateurs afin de disposer toujours d’un pack d’accus à capacité de décharge proche. Dans ce document, nous cherchons à étudier le principe d’un capacimètre pour accumulateur de type CdNi ou NiMH.

 Vous en avez marre de bronzer idiot …
Vous en avez marre de bronzer idiot …