
Pendant le second semestre 2010/2011, les étudiants de 1ère année du département G.E.I.I. de l’IUT de Nîmes vont travailler sur un projet de type A.P.P., Apprentissage par Problèmes et Projets. Le thème choisi est la réalisation d’un robot de type suiveur de ligne pour le tournoi de robotique de Nîmes 2011. Ce tournoi aura lieu au lycée Alphonse Daudet les 20 et 21 mai 2011.
Un ensemble de document sera distribué ou disponible sur ce site à la page Projets.
Un nouveau thème est ajouté au tournoi national de robotique de Nîmes. Il s’agit de robots devant parcourir un labyrinthe dessiné par une ligne noire sur fond blanc. Le robot doit être de type suiveur de ligne. On ajoutera un algorithme de résolution de labyrinthe de type main droite ou main gauche.
Afin de mener à bien ce projet, nous vous proposons quelques éléments de réflexion, divers documents et liens.
Structure d’un robot suiveur de ligne :
Avant d’aboutir au résultat espéré, voici quelques étapes nécessaires.
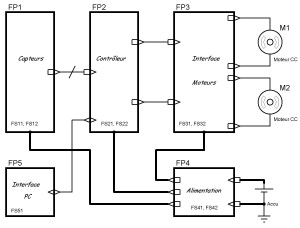 Synoptique :
Synoptique :

Ce document permet d’illustrer la structure d’un robot type suiveur de ligne. 5 fonctions principales sont nécessaires pour former notre structure. Les 3 premières fonctions sont triviales, voir même la fonction alimentation, mais pourquoi ajouter une Interface Homme machine. On suppose qu’une fois programmé, il n’y a pas lieu d’avoir un dialogue entre le robot et une console. Pourtant, un dialogue régulier est un moyen d’améliorer le programme et une interface PC bien programmé permet de mettre en évidence des anomalies à corriger mais aussi de percevoir les limites du système. C’est donc un bon moyen pour synthétiser l’étude et progresser dans la réflexion pour aller de l’avant.
Avant de passer à la réalisation de la première phase, un ensemble de documents sont nécessaires, comme des TPs sur les composants utilisés et les fiches techniques de ces mêmes composants et un planning du travail à effectuer.
Planning : ce document donne une estimation de l’organisation dans le temps et le temps réel mis par les plus rapides et ceux qui sont ne retard.
Les fiches techniques sont regroupées à la page : Fiches Techniques
Les Travaux Pratiques suivants doivent être réalisés afin de bien comprendre certains aspects pratiques de leur mise en oeuvre :
TP n°1 sur le détecteur de ligne, CNY70 : TP_1_CNY70.pdf
TP n°2 sur la carte à µC 16F88 : TP_2_16F88.pdf
TP n°3 sur l’interface moteur L293D : TP_3_L293D.pdf