Cette feuille d’exercices sur la loi d’ohm est de complexité croissante. Les résultats sont données en fin de documents ainsi que des notes sur les points importants pour chaque exercice.
Ce texte est protégé par une loi qui m’autorise à le distribuer sans le modifier. Ce qui explique que je le laisse en anglais. Par ailleurs, l’anglais est la langue la plus utilisée dans la documentation technique en électronique. Il ne faut pas en être effrayé car le plupart des termes employés sont assez faciles à traduire. Vos enseignants en anglais et les autres sont là aussi pour vous aider à lire l’anglais technique.
Le tournoi national de robotique de Nîmes se met en place petit à petit. Pas de changement majeur sur les règlements à prévoir. Les deux principales compétitions seront le tournoi mini sumo et le suiveur de ligne en duo. En démonstration, toujours les robots labyrinthe et peut-être des bolides solaires. Les démonstrations libres sont à la discrétion des organisateurs, qu’il faut donc contacter au préalable.
Le site officiel www.robot-sumo.fr vous permettra de vous inscrire et de télécharger les règlements des différentes compétitions, ainsi que de visualiser différentes photos et vidéos des éditions précédentes.
Le site du tournoi sera le prestigieux lycée Alphonse Daudet, au cœur de Nîmes face aux magnifiques Arènes de Nîmes que l’on ne présente plus.
Ave Nemausus 2011, morituri te salutant!
« Pourraient se dire nos petits gladiateurs mécaniques. »
La date est fixée au samedi 21 mai 2011. Ce qui devrait arranger pas mal de candidats des éditions passées. Plus de temps à passer pour préparer son monstre et pour les écoles, plus de temps aussi pour finaliser la pédagogie autour de ce thème. Vous n’aurez plus d’excuses pour ne pas participer.
Voici une liste de logiciels utilisés dans le cadre de l’enseignement de l’électronique et de l’informatique industrielle. Certains sont gratuits ou limités, d’autres payants, donc avec une licence.
Ces logiciels ne sont qu’une partie de tous ceux qui sont utilisés par le département. N’hésitez pas à demander à vos enseignants, des versions gratuites des autres logiciels utilisés dans d’autres matières, lorsque cela est possible.
Dans la liste suivante, les liens de téléchargement vous permettront d’accéder directement aux pages de téléchargement ou aux sites de la marque. En plus des exercices qui vous seront donnés pendant les cours, vous pouvez en trouver d’autres sur Internet en utilisant des mots clés. N’hésitez pas à essayer ces logiciels, même les versions sous licence qui peuvent souvent être utilisées pendant un mois ou plus.
Orcad schematic : Logiciel de simulation de type Spice, très puissant. Ce soft permet de dessiner des schémas électroniques normalisés et de les simuler. Il utilise le modèle mathématiques de type Spice des composants électroniques (gratuit mais limité).
Eagle 6.4 : Logiciel de dessin de schéma électronique et de dessin de circuit imprimé. Super logiciel dont l’avantage est aussi un inconvénient: ses librairies de composants sont tellement nombreuses qu’on perd un temps fou pour trouver un composant lorsque l’on découvre ce soft. Pendant le cours, une librairie spéciale sera distribuée aux étudiants (version gratuite mais limitée, Windows, Linux et Mac)
Flowcode V3 PIC : Logiciel de programmation par organigramme et de simulation de microcontrôleur. Utilisé dans les lycées techniques, ce logiciel est utilisé au 1er semestre pour programmer un petit PIC 16F88. Nul besoin de connaitre l’assembleur ou les langages Basic ou C, la programmation est graphique et très simple. Il est possible de simuler son programme avant de l’envoyer dans le µC (version 3 gratuite, mais limitée)
MPlab : Environnement de développement pour microcontrôleur PIC. Microchip est un fabricant de composants de type µC qui a choisi d’offrir l’environnement de développement. Avec la possibilité de programmer en assembleur, en C, de simuler, ainsi que de transférer le programme dans un composant, c’est un outil indispensable pour tous ceux qui travaillent avec des PIC (gratuit)
CCS : compilateur C associé à MPlab, le forum est un des plus fournis sur toutes les problématiques autour des PIC en langage C. Vous trouverez assez facilement un bout de programme qui correspond à vos besoins (licence).
Tinybootloader : Petit logiciel de téléchargement de programme dans un PIC. Le programme de dialogue et de programmation du PC vers le µC doit être associé avec un petit bout de programme préalablement installé dans la puce. (gratuit)
LabView : Logiciel de programmation évolué avec interface graphique industrielle. Ce logiciel est un must en matière de supervision et de traitement de n’importe quel process. Adopté par les plus grandes sociétés, il permet de traiter des informations lourdes pour analyse et affichage (licence).
Fritzing : logiciel d’aide à l’utilisation des plaques d’essai sans soudures (gratuit)
« De tous les écrits professionnels, le rapport est le document clé de la prise de décision mûrie. Son rôle est donc essentiel. Savoir rédiger des rapports efficaces est un atout et un signe de professionnalisme. »
Extrait de cet ouvrage consacré à la rédaction de rapport.
Il existe divers ouvrages consacrés à cet exercice, nous ne souhaitons pas particulièrement conseiller l’un ou l’autre, sachant que des cours de culture et communication sont dispensés dans notre département. Mais, en complément de ces cours, nous vous proposons un document d’aide à ce travail.
La rédaction du rapport de stage est un élément essentiel du cursus universitaire et savoir rédiger ce document est une nécessité pour les étudiants des filières IUT.
Nous avons essayé de rédiger un document qui regroupe des points importants de la rédaction de ce document. Il se veut généraliste, mais vous le trouverez peut-être trop orienté IUT GEII. C’est, en partie, voulu par ses auteurs.
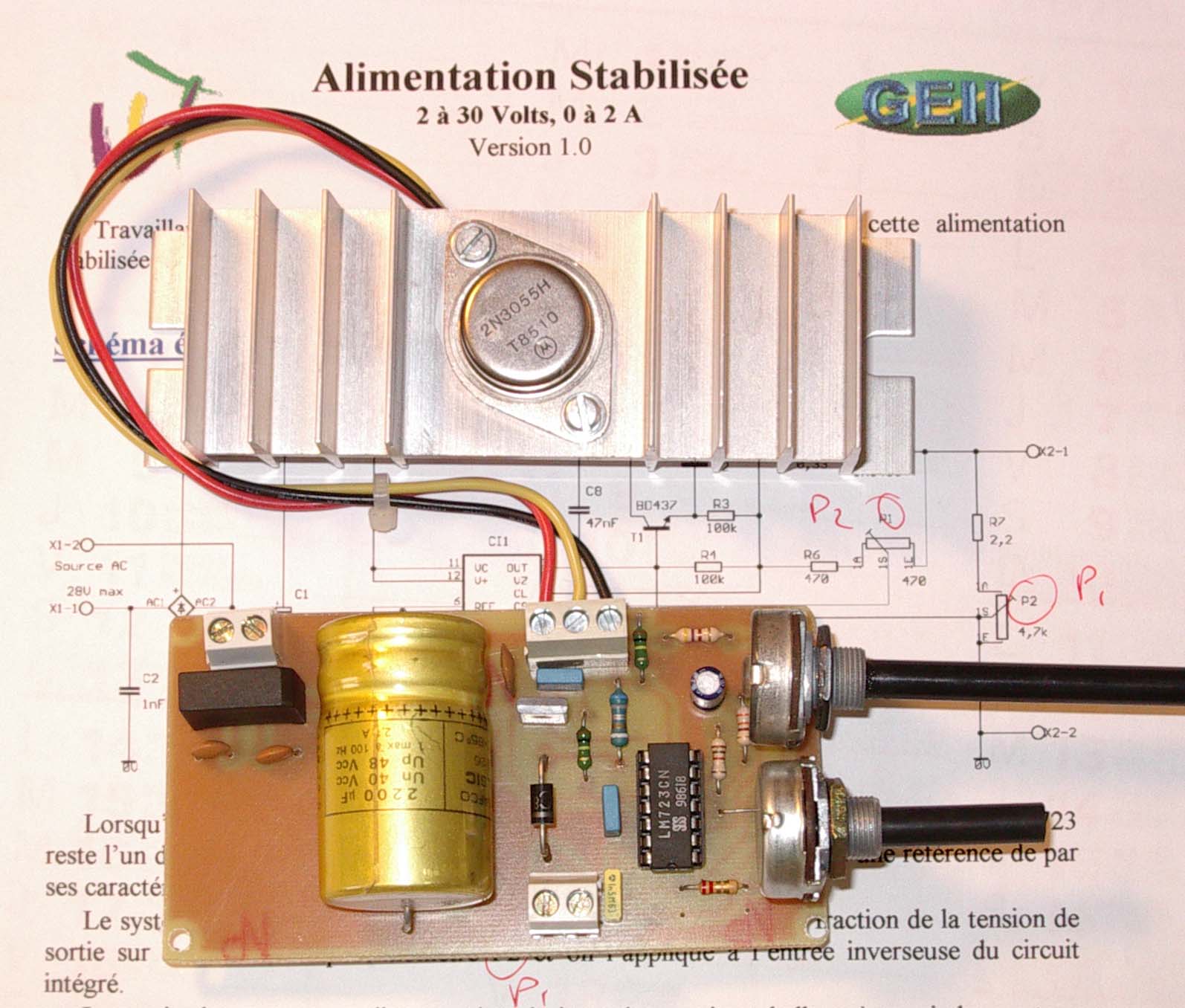
Ce montage est indispensable dans tout bon labo qui se respecte. C’est l’élément de base pour prétendre travailler correctement. Cette alimentation est réglable en tension et en courant.
L’élément central est un LM723; c’est une référence en la matière et un gage de stabilité et de qualité. Ce composant, vieux de plus de 30 ans, est encore utilisé dans la plupart des alimentations stabilisées commercialisées.
Le montage proposé permet de disposer d’une tension réglable de 2 à 30 Volts et d’un courant de 0 à 2 Ampères. Le fait de posséder une limitation variable en courant est un vrai plus pour tester des montages nouveaux, dont on est pas sur de l’absence de court-circuits.
Le transistor ballast est un classique 2N3055 monté sur un radiateur séparé, il est associé à un driver BD437 bien supérieur au 2N1711 des premiers montages. Ce radiateur pourra être fixé à l’extérieur du boitier. A cela, il faut ajouter un transformateur 220/28 max. Il ne faut pas dépasser 28 Volts en entrée du montage. Car le LM723 n’est plus opérationnel au dessus de 40 Volts (28 x 1,41).
Cliquez ici pour télécharger le pdf : Alim 723.pdf
Cette carte a été développée à l’I.U.T. de Nîmes pour le club de robotique en 2004. Elle a permis à plusieurs étudiants de réaliser les premiers robots de type mini-sumo. Et l’année suivante, le tournoi de robots mini sumo a vu le jour organisé par notre école.
C’est donc une carte très orientée robotique. Après quelques améliorations liées essentiellement à l’évolution des composants, cette nouvelle version vous est proposée. Sa taille et ses capacités sont autant d’atouts pour créer son premier robot programmable.
L’idée de départ est d’apprendre à programmer sans trop se soucier des aspects électroniques du robot. Dans ce cas là, la programmation peut débuter par l’utilisation du logiciel Flowcode gratuit mais limité dans sa version 3. Cette version du logiciel accepte le PIC16F88 utilisé sur cette carte.
Pas besoin d’avoir recours à un programmateur, car l’autre idée est d’utiliser un petit programme appelé bootloader qui dialogue avec la puce et change le programme selon le bon vouloir de son programmeur. Pour dialoguer il vous faudra une autre petite carte comme le convertisseur USB/TTL pour les PC modernes ou un convertisseur RS232/TTL pour les classiques.
Pour ceux qui sont intéressés par le logiciel Flowcode, voici le lien : Matrix Multimedia
Et pour ceux qui voudrait essayer avec leur carte maison, voici le fichier .hex à programmer dans le PIC : bootloader. Il vous est fourni sous la forme d’un fichier .exe à lancer qui décompactera le fichier .hex. Il correspond au 16F88 avec horloge interne à 8MHz, 19200 baud, MLI sur RB3. Le programme de dialogue et de programmation est Tiny Pic Bootloader de Claudio Chiculita. Cet internaute a réalisé un superbe travail avec ce programme qui simplifie la vie des programmeurs peu équipés.
Développé à l’I.U.T. de Nîmes, pour les enseignements de robotique et de systèmes embarqués, Picky est le fruit de la collaboration entre un enseignant de cette école et la société Easy Robotics.
Sa première sortie en public a eu lieu au Palais de la Découverte de Paris, lors de démonstrations de robotique de mai à juillet 2007.
Ce robot a fait l’objet d’un article paru dans la revue spécialisée Electronique Pratique de novembre 2007.
Il est actuellement distribué par la société Electronique Diffusion.
Ce robot est le support des cours de robotique et systèmes embarqués au 3ème semestre du département GEII. Pendant 4 séances de 6h, les étudiants, de 2ème année option RLI, suivent un enseignement de robotique avec 1 h de cours suivie de 5h de TD/TP sur cette maquette.
Les thèmes abordés en robotique sont: capture d’une entrée, déplacements élémentaires, interface homme machine (IHM) par afficheur LCD et par liaison série sans fil (XBee).
Les autres thèmes abordées pour l’étude des systèmes embarquées sont : programmation en C (compilateur CCS), la programmation par interactions prioritaires, le multitâche coopératif.
Le test final porte sur la connaissance des divers outils matériels (robot + interface de programmation) et logiciels (Mplab IDE, tinybootloader) pour mettre en œuvre le robot et l’écriture d’un programme pour réaliser une action suite à un évènement extérieur.
Études & Réalisations:
Lors du 4ème semestre, les étudiants ont la possibilité de continuer à étudier la robotique en travaillant sur un thème plus complet tel qu’une compétition de robotique. Les IUT GEII de France organisent, depuis 2002, une compétition réservée à leurs seuls étudiants.
La carte électronique de notre maquette est intégrée sur une plateforme plus complexe permettant de répondre au cahier des charges du concours.
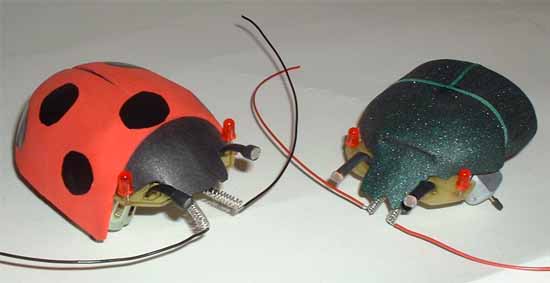
Cet article est paru dans la revue Micros & Robots n°2 en novembre 2001 sous le titre :
Insectes : scarabée ou coccinelle
Ce petit robot fait partie de la grande famille des robots qui copie les comportements des insectes. Mais sa particularité essentielle réside dans sa simplicité de fabrication. Il n’utilise pas de microprocesseur comme cerveau mais simplement une électronique discrète. Malgré son coût de fabrication faible, il réagit comme un organisme vivant de type insecte. Il est facile de le transformer un cafard agressif ou coccinelle docile. De plus il se dirigera vers une source de lumière pour évoluer.
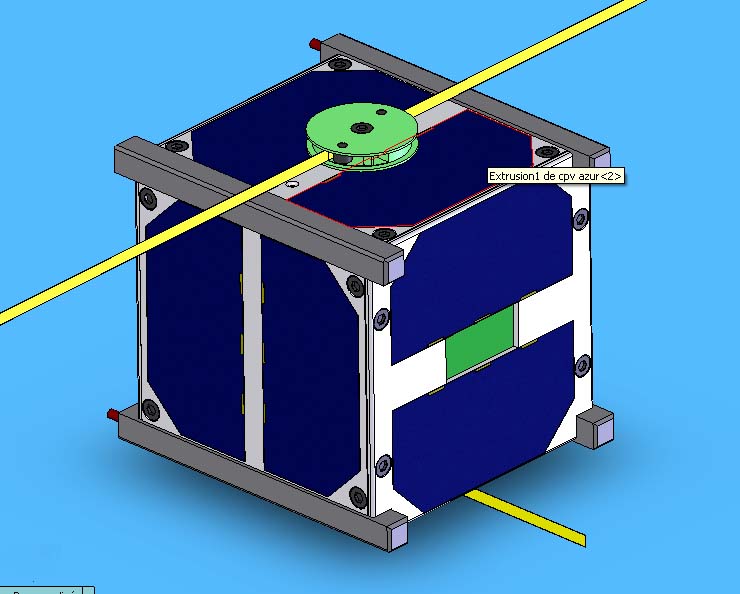
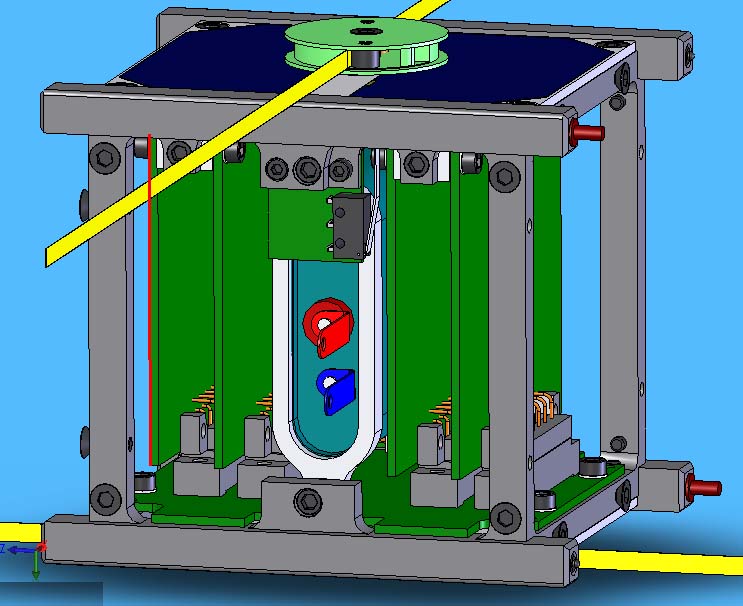
En 2006, le CNES de Toulouse lance EXPRESSO , un appel à projets étudiants auquel l’Université Montpellier 2 répond en proposant la conception et la réalisation d’un pico-satellite nommé ROBUSTA . Le porteur de projet est le professeur Laurent Dusseau du laboratoire IES (Institut d’Electronique du Sud). Ce satellite répond à la norme Cubesat (1kg, 1l, 1W) Il embarquera une véritable expérience scientifique. Sa mission consistera à mesurer l’effet des radiations sur des composants à base de transistors bipolaires communément utilisés dans l’aérospatiale. Les résultats ainsi recueillis seront confrontés aux résultats obtenus par une méthode de test mise au point au laboratoire de Montpellier.
L’un des points originaux de ce projet, outre la mission du satellite, est le fait que la satellite soit entièrement réalisé uniquement par des étudiants. C’est un projet fédérateur puisqu’il regroupe les formations issues de l’IUT de Nimes, de Polytech’Montpellier et des formations de master de l’UFR. Robusta doit décoller de Kourou sur le nouveau lanceur Européen Vega.
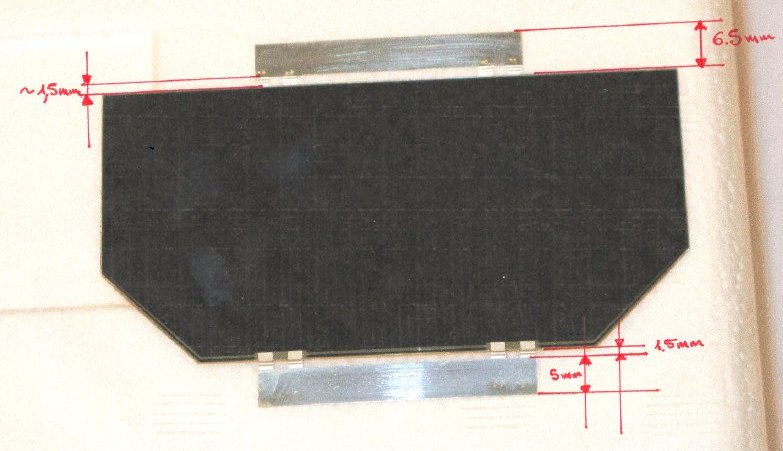
L’IUT de Nîmes est en charge de réaliser la structure mécanique en aluminium (Département Génie Méca.) et la carte de puissance avec les faces et leurs cellules photovoltiques (Département Génie Elect. et Info. Indust.).
Les cellules sont des triples jonctions avec une tension plus élevée de 2,5Volts et un rendement de plus de 28%.
La tension par face est de l’ordre de 5Volts sous 500mA. Les faces photovoltaïques permettent de charger un accu LiPo.
La structure interne dessinée par le département GEII permet de bien visualiser le positionnement de chaque carte et le rôle de chacun dans cette aventure.
Cette aventure a permis aussi à un étudiant de réaliser un vol parabolique sur Airbus A300 ZERO G de la société Novespace.
Les retombées de ce projet sont nombreuses pour plusieurs années. Le département GEII est une porte d’entrée pour tous les étudiants qui souhaitent participer à cette aventure qui se poursuit pour les meilleurs, dans les laboratoires de IES de Montpellier 2. Avoir un CV qui montre une participation à une aventure spatiale n’est pas commun.