
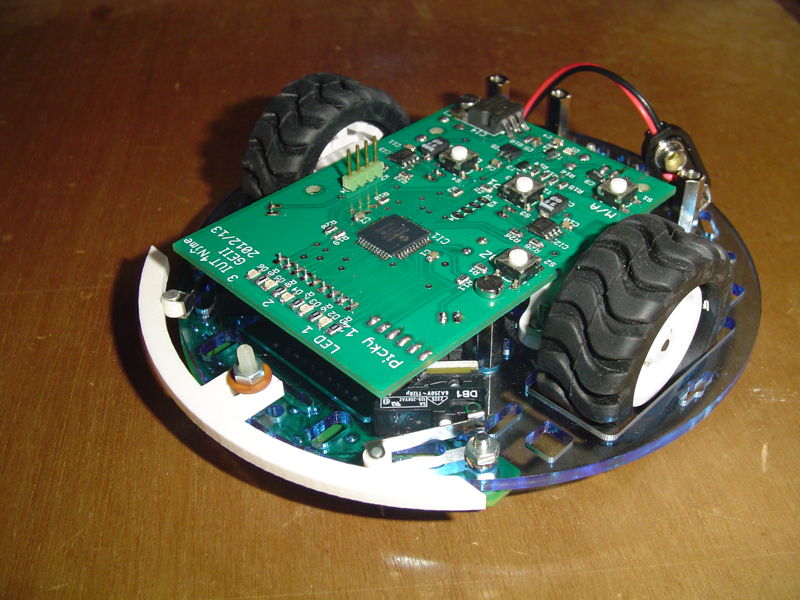

Pendant ce second semestre 2012-2013, les étudiants vont apprendre à programmer une plateforme pédagogique de type robotique. Il s’agit du robot Picky 12, résultat du travail réalisé par les étudiants des années précédentes encadrés par leurs enseignants. Cette maquette a été étudiée afin de mieux répondre au besoin de l’enseignement de ERII S2. Cet enseignement porte sur la programmation d’un système à caractère industriel. La robotique est l’industrie du XXIème siècle. Les robots domestiques vont devenir omniprésent dans notre vie quotidienne. De plus en plus intelligent, ils vont réaliser des tâches quotidiennes domestiques, comme passer l’aspirateur (Robot Roomba d’IRobot) ou surveiller de vos paramètres vitaux (le Smart Shirt est un maillot de corps “intelligent” mis au point les chercheurs de l’Institut de technologie de Georgie pour US Navy).
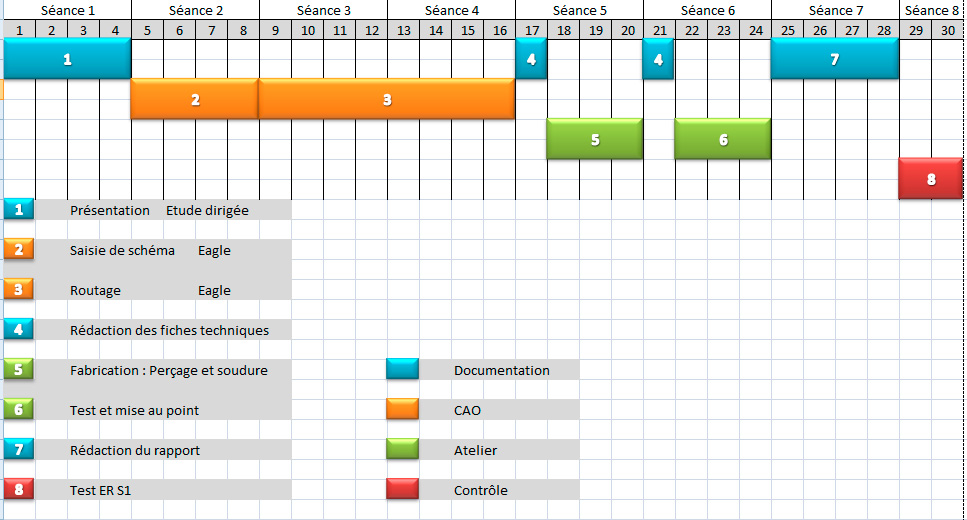
Planning des séances : Groupe BD, EG
Apprendre à programmer un micro-contrôleur doit se faire petit à petit en suivant des étapes, comme lorsque l’on découvre un nouveau produit. L’enseignement proposé suit ce principe, mais implique un travail régulier de la part de l’apprenant.
Les éléments suivants doivent être installés avant de commencer.
MPLAB 8.8x
HTC 9.8 – Compilateur C
DS30Loader – Bootloader
Les documents suivants sont les fichiers et documentations nécessaires pour faire les exercices. Vérifier de toujours disposer des versions les plus récentes.
ERS2_Picky12 – fichiers des exercices
Exercices et annexe – documents de travail
Picky12_api – fichiers des exercices API











{kind=link}
{kind=link}
{kind=link}
{kind=link}