
Salon des métiers de l’Air et de l’Espace
Candillargues 2014
Nous serons présents, le 14 juin 2014, sur l’aérodrome de Candillargues pour vous montrer les réalisations de cette année.
Nous serons présents, le 14 juin 2014, sur l’aérodrome de Candillargues pour vous montrer les réalisations de cette année.
 Les 23 et 24 mai 2014, au lycée A. Daudet de Nîmes, auront lieu la 10ème édition du tournoi de robots mini-sumo.
Les 23 et 24 mai 2014, au lycée A. Daudet de Nîmes, auront lieu la 10ème édition du tournoi de robots mini-sumo.
C’est l’occasion de parler d’autres thèmes très porteurs comme l’espace avec la présence en conférences de M. Michel Tognini, astronaute français.
Deux conférences sont programmées le vendredi 23 mai. la 1ère à 10h est réservée aux élèves du lycée A. Daudet. La 2ème, à 18h, est ouverte à tous, gratuite, mais sur réservations auprès du secrétariat du lycée.
Le samedi 24 mai se déroulera la 10ème édition du tournoi de robotique avec des robots mini sumo, suiveur de ligne, labyrinthe et des démonstrations d’imprimantes 3D.
Venez nombreux assister à ce tournoi, l’entrée est libre.
 On en finit pas de vous montrer tout ce qui a fait le sel de l’année 2013.
On en finit pas de vous montrer tout ce qui a fait le sel de l’année 2013.
 Le jury de la 23ème édition des Prix Espace et Industrie a récompensé le projet Némo’Space du Club Sup’Sats du prix Europropulsion, le 7 décembre 2013, à Paris. Le jury était composé de plusieurs intervenants du monde de l’aéronautique et de l’espace regroupés au sein du GIFAS.
Le jury de la 23ème édition des Prix Espace et Industrie a récompensé le projet Némo’Space du Club Sup’Sats du prix Europropulsion, le 7 décembre 2013, à Paris. Le jury était composé de plusieurs intervenants du monde de l’aéronautique et de l’espace regroupés au sein du GIFAS.
Palmarès 2013 de la 23ème édition des Prix Espace et Industrie
Bravo à Loïc Delaye et Pierre-François Bobo pour leur prestation qui a convaincu le jury.
 Vivre Nîmes Octobre/Novembre 2013.
Vivre Nîmes Octobre/Novembre 2013.
Notre IUT est encore l’honneur dans les pages du bimensuel “Vivre Nîmes” des mois d’octobre et novembre 2013. le projet Némo’Space partage la page avec un autre beau projet réalisé par les étudiants GC.
Pour lire le magazine (page 23)
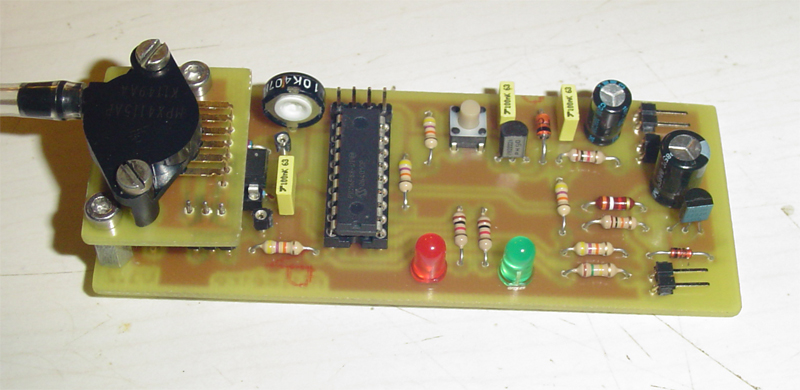 Le projet d’électronique de cette année est la conception d’un altimètre pour mini fusée.
Le projet d’électronique de cette année est la conception d’un altimètre pour mini fusée.
Le cahier des charges pour la conception d’une mini-fusée, est imposé par l’association “Planète Sciences”. De ce document, on ne retiendra que la partie électronique. Les autres aspects seront traités par les étudiants des départements mécanique et matériaux. Ce projet s’inscrit dans la continuité de l’année précédente, après la réussite du lancement de la fusée Némo’Space 2013, cette été à Biscarrosse.
La partie électronique se résume à concevoir au minimum, un séquenceur permettant d’activer le système de récupération de la fusée. Il s’agit, en général, d’un parachute qui doit s’ouvrir à l’apogée du vol. Ce moment correspond à la vitesse minimale de la fusée garantissant une ouverture du parachute à moindre risque.
Mais c’est un peu court à notre gout. Nous allons ajouter une expérience à ce séquenceur, sous la forme d’un détecteur d’apogée. Ce système supplémentaire doit être capable d’activer la trappe d’ouverture du parachute avant la fin d’une fenêtre temporelle, elle-même axée sur le temps calculée par le simulateur de trajectoire.
En effet, une simulation ne peut pas donner le moment précis, car il est difficile de faire intervenir tous les paramètres réels d’un vol. Le vent latéral, le cx de l’ogive, l’angle avec la verticale, le poids de la fusée au décollage ou lorsque le propulseur est vide à la fin de la poussée, influe très sensiblement sur le moment ou la fusée atteint son apogée.
Documents divers :
S1a et S1b – Planning des séances
Schéma V1.3.pdf – schéma de l’altimètre V1.3
Altimetre V1.3.sch – fichier eagle
Altimeter 1.1.zip – fichier Script
Fiche de commande 1.3 – fichier pdf
Fiche de fabrication 1.4 : détails pour placer les composants – fichier pdf
Fiche de tests 1.2 : procédures de test pour valider la carte – fichier pdf
Liens divers :
Planète Sciences – base documentaire et cahier des charges du projet
MPX4115 – Data Sheet d’un capteur de pression de chez Freescale

Les étudiants heureux de la réussite de ce projet, prennent la pose
Après une année de travail, le projet Némo’Space 2013 a atteint tous ses objectifs. La mercredi 28 aout à 10h, la fusée s’est élevée à 2120m en 18s. Une poussée de 10,9g l’a propulsée à une vitesse maximale de 270m/s (970km/h). A l’apogée, le parachute s’est ouvert et la fusée a été retrouvée à 2km du pas de tir sur la plage du centre d’essais. Les coordonnées GPS fournies par la fusée pendant sa descente ont permis de la retrouver très rapidement.
Vidéos du lancement
DGA- http://www.youtube.com/watch?v=DvHmhUuZsmI
GoPro 1 – http://www.dailymotion.com/c-space-2013-supsats-nemo-space-1_tech
GoPro 2 – http://www.dailymotion.com/c-space-2013-supsats-nemo-space-2_tech
Reportage 50 ans de C’Space – http://www.youtube.com/watch?v=rRQKhANq1h8&feature=player_embedded
la gazette du jeudi 29 aout 2013 – espace_temps_5










 Pour la 1ère fois, la fusée a été assemblée entièrement. Tous les éléments se sont ajustés sans trop nécessité de reprises.
Pour la 1ère fois, la fusée a été assemblée entièrement. Tous les éléments se sont ajustés sans trop nécessité de reprises.
Le fonctionnement est nominal, c’est à dire que la trappe s’ouvre au temps simulé prévu.
La compatibilité rampe est correcte.
Une dernière question nous taraude :
Faut-il peindre la fusée ?

Prochaine étape – lancement de la fusée à Biscarrosse, fin aout
 Vivre Nîmes, le magazine d’information de la ville consacre une pleine page sur le tournoi de robotique dans son numéro 105 de mai 2013 en page 16.
Vivre Nîmes, le magazine d’information de la ville consacre une pleine page sur le tournoi de robotique dans son numéro 105 de mai 2013 en page 16.
Cet évènement en est à sa 9ème édition. Et pour la 3ème fois, c’est en partenariat avec le lycée A. Daudet de Nîmes que le département GEII de l’IUT de Nîmes organise son tournoi de robotique. Renommé “Journées de la robotique” pour le lycée, elles permettent d’assister à des ateliers scientifiques où les élèves du lycée présentent leurs travaux de l’année. Une conférence scientifique sur le robot martien Curiosity sera le point d’orgue de la journée du vendredi 24 mai à 10h. C’est un ingénieur du CNES (Centre National d’Etudes Spatiales) qui nous fera revivre la genèse de cette aventure et répondra aux questions de l’auditoire (entrée libre).
Un encart est consacré à un autre projet de l’IUT de Nîmes en 2013, la réalisation d’une fusée expérimentale (voir les autres articles du site).
 Le reportage sur France 3 Pays Gardois : Lien
Le reportage sur France 3 Pays Gardois : Lien

Notre région accueille le 13 avril 2013 sur l’aérodrome de Candillargues (34), le 1er salon des métiers de l’air et de l’espace.
Entrée libre de 9h à 18h.
Notre IUT sera présent avec un stand présentant les nombreuses activités en relation avec ce thème. Vous pourrez nous rencontrer pour discuter autour de notre satellite Robusta ou de notre nouveau projet de fusée expérimentale Némo’Space. Les étudiants impliqués dans ces projets vous feront partager leur plaisir de participer à l’aventure spatiale.
