 Amplificateur à 3 transistors, Classe AB, Push-Pull, P=0,5W
Amplificateur à 3 transistors, Classe AB, Push-Pull, P=0,5W
Document au format pdf
Document AM1 ( pour les étudiants GEII, semestre 1)
Idée
L’idée de départ est de permettre à un débutant de réaliser un amplificateur audio simple. Ce montage est parfait pour amplifier le son d’un smartphone. Il n’est pas très performant, mais il est largement suffisant pour découvrir l’électronique de façon agréable.
Les explications données sont une information complémentaire pour ceux qui veulent comprendre son fonctionnement. Les débutants auront besoin de consulter des documents généralistes expliquant le fonctionnement des transistors dans les montages de base, avant d’aborder celui-ci.
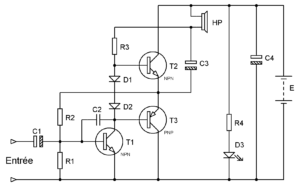
Schéma du montage
Le schéma est l’un des plus simples qu’il soit possible de trouver. Il utilise 3 transistors très classiques.
Explications
L’explication doit se faire en 3 parties. En premier, il faut comprendre la structure choisie, ensuite le fonctionnement du montage en statique, c’est-à-dire lorsqu’il n’y a pas de signaux en entrée, et pour finir, analyser le fonctionnement en dynamique avec un signal à amplifier en entrée.
La structure de cet amplificateur
Sa structure peut être décomposée en 2 parties. A gauche, T1 est un transistor en mode Émetteur Commun pour amplifier la tension d’entrée. A droite, T2 et T3 sont montés en Collecteur Commun pour amplifier le courant. C’est l’association des 2 étages en cascade qui permet d’obtenir de la puissance en sortie, P=UI . T2 et T3 forment une structure de type Push-Pull, étage de sortie typique d’un amplificateur de puissance. Les 2 diodes en série permettent une polarisation en classe AB de ces 2 transistors pour réduire la distorsion de croisement.
Les valeurs des résistances permettent de régler les courants au repos. Les condensateurs limitent la bande passante au domaine audio.
Analyse au repos
Le but de cette analyse est de comprendre le choix des valeurs pour les résistances. Pour cela, on simplifie le montage en supprimant les condensateurs équivalent à des circuits ouverts en continu. Le haut-parleur est une charge négligeable, car elle est en série avec R3 de valeur très supérieure.
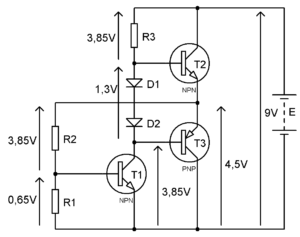 La règle n°1 dans ce type de montage, c’est d’obtenir une tension en sortie du montage égale à la moitié de la tension d’alimentation, entre les 2 transistors T2 et T3. Pour obtenir cela, il faut que ces 2 transistors soit légèrement passant. Pour rendre ces 2 transistors passants, il faut que la tension entre leur base soit égale à 2 fois 0,65V environ. C’est le rôle des 2 diodes D1 et D2, en faisant passer un courant dans ces diodes, on obtiendra cette valeur de 1,3V. C’est le transistor T1 qui va gérer ce courant dans les diodes, lorsqu’il va être passant.
La règle n°1 dans ce type de montage, c’est d’obtenir une tension en sortie du montage égale à la moitié de la tension d’alimentation, entre les 2 transistors T2 et T3. Pour obtenir cela, il faut que ces 2 transistors soit légèrement passant. Pour rendre ces 2 transistors passants, il faut que la tension entre leur base soit égale à 2 fois 0,65V environ. C’est le rôle des 2 diodes D1 et D2, en faisant passer un courant dans ces diodes, on obtiendra cette valeur de 1,3V. C’est le transistor T1 qui va gérer ce courant dans les diodes, lorsqu’il va être passant.
Un équilibre sera obtenu entre tous ces transistors par le choix des 2 résistances R1 et R2.
Pont diviseur de tension : 
Cette équation est insuffisante pour choisir un couple de valeur pour R1 et R2. On va faire intervenir la valeur des courants en commençant par dimensionner R3.
Un courant de l’ordre de 1 à 2mA suffit pour polariser les diodes, mais il faut savoir que R3 définit aussi le courant de base de T2. On reviendra sur T2, plus tard.
Donc on calcule: R3 = 3,85/0,002=1925Ω, soit une valeur pratique de 1,8kΩ.
Donc, le courant dans le collecteur de T1 est de l’ordre de 2mA. T1 est un transistor de gain en courant de l’ordre de 200, c’est un modèle B. Le courant de base est de 10µA. Pour pouvoir régler la tension à 0,65V sur la base de T1, il faut un courant dans R1 au moins 5 fois plus grand. Donc on choisit 50µA et on calcule R.
R1 = 0,65/0,00005=13kΩ, soit une valeur pratique de 12kΩ.
D’où une valeur pour R2 de 6 fois 12kΩ, soit 72kΩ, on prendra la valeur pratique de 68kΩ.
Mais on aurait pu choisir d’autres couple de valeurs pour R1 et R2 (4,7k et 27k ou 10k et 56k). Cela augmente un peu la consommation, mais permet de tolérer des transistors de gain plus faible pour T1..
On y a ajouté une Del rouge pour vérifier la présence de la tension 9V. Mais vous pouvez souhaitez faire l’économie de ce courant, dans ce cas, ne placer pas les 2 composants, R4 et D3.
Il est très important d’apparier les 2 transistors T2 et T3. C’est-à-dire que le gain en courant de ces 2 transistors soit le même. Cela garanti une amplification identique des 2 alternances du signal. Un tri par référence des transistors est insuffisant, il faut absolument mesurer plusieurs transistors et sélectionner ceux qui ont un gain proche.
Fonctionnement en amplification
La puissance annoncée est de 0,5Watt, mais quelle est la puissance maximale théorique ?
En réalité, il est difficile d’obtenir une tension en sortie dont l’amplitude serait maximale (4,5V). Les transistors se saturent pour une tension de l’ordre de 1V.

De plus il faut tenir compte de la tension de 0.6V entre la base et l’émetteur et de la chute de tension dans la résistance R3. C’est surtout cette résistance qui limite tout et le gain en courant du transistor T2.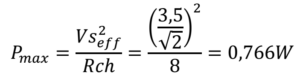
La tension maximale disponible est obtenue lorsque la diode D1 n’est plus passante. Le courant de 2mA est amplifié par T2. Le gain de ce transistor est de l’ordre de 175. Soit une tension aux bornes de la charge de :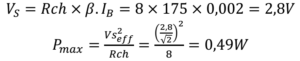
Mais, là aussi, la réalité est différente car le gain en courant des transistors diminue au delà de 100mA. Donc la puissance réelle, sans nuire à la qualité est encore un peu inférieure.
Les transistors choisis sont des modèles TO92 en plastique, de puissance maximale de l’ordre de 600mW. Avec des pointes de courant à 350mA sous presque 3V, on atteint sa limite, mais comme ce n’est pas en continu et que ce n’est vrai que pour une seule alternance, la valeur moyenne de la puissance dissipée par chaque transistor est plus proche des 100mW au maximum.
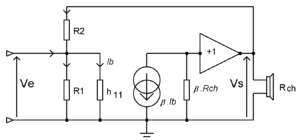
Le gain en tension du montage est le gain en tension du 1er étage autour de T1, dont la charge est l’impédance du 2ème étage. On rappelle que le gain du 2ème étage est de l’ordre de 1, car les 2 transistors sont montés en collecteur commun.
Le montage de la charge (le haut-parleur) entre le plus de l’alimentation et le point milieu du push-pull avec un condensateur en série est un montage type bootstrapp, permettant d’améliorer la dynamique du signal de sortie. En son absence, les alternances positives du signal de sortie seraient plus petites. Le petit inconvénient de ce montage original, c’est que l’on entend le condensateur se charger à la mise sous tension et qu’il y a 2mA qui passe dans le haut-parleur au repos.
Réalisation du montage
Pour réaliser ce montage sur un circuit imprimé, il vous faudra réaliser le circuit imprimé en copiant l’image suivante, ou en téléchargeant le fichier associé. Puis percer et souder les composants indiqués dans la nomenclature.
Le circuit imprimé
Les dimensions du circuit imprimé sont de 62,2mm de long sur 25,4mm de large.
On a veillé à ne pas avoir de boucle de masse dans le circuit imprimé. La fixation du circuit sur un boitier devra se faire avec des entretoises isolées.

Nomenclature (liste des composants)
R1 : 12kΩ (marron, rouge, orange, or) C1 : 10µF (25V vertical)
R2 :68kΩ (bleu, gris, orange, or) C2 : 150pF
R3 :1,8kΩ (marron, gris, rouge, or) C3, C4 : 220µF (25V vertical)
R4 : 4,7kΩ (jaune, violet, rouge, or) D1, D2 : 1N4148
T1 : BC547B D3 : Del rouge 3mm
T2 : BC337 K1, K2 : connecteur femelle 1×02
T3 : BC327 K3 : connecteur mâle 1×02
Circuit imprimé : IU_614
Tests
Le premier test est optique. Vérifier que vos soudures sont bien brillantes et qu’elles ne sont pas en court-circuit avec d’autres. Les soudures doivent ressembler à un volcan (pas de boules ou trop peu de soudure). Que les composants sont branchés dans le bon sens.
Dans les conditions normales, on doit utiliser une alimentation de laboratoire réglée sur 9Volts avec limitation d’intensité. Mais il est possible de faire un test simple en utilisant une pile 9Volts connectée à K3. Le haut-parleur est remplacé par une résistance de test de 8 Ohms. La Del rouge doit s’allumer.
Vérifier avec un multimètre, en mode voltmètre, les tensions entre les 2 transistors T2 et T3. Si la tension est de l’ordre de 4,5Volts, vous pouvez remplacer la résistance de test par un haut-parleur et brancher la prise pour le téléphone.
Maintenance
Si la Del ne s’allume pas, il est possible que la pile soit vide ou que vous ayez un problème de soudures.
Si la tension entre les transistors T2 et T3 n’est pas correcte, il est fort probable qu’un ou plusieurs composants sont soudés à l’envers ou détruits, ou bien qu’il y a un court-circuit.
Caractéristiques
- Puissance efficace de 0,5W sous une charge de 8Ω
- Tension d’alimentation : pile 9Volts
- Consommation inférieure à 50mA, soit une autonomie de plus de 5h.
- Sensibilité 25mV
- Bande passante de 160Hz à 20kHz
- Indicateur de fonctionnement par une Del rouge 3mm
Notes sur les composants
Les transistors
Il s’agit de modèles très classiques qui peuvent être remplacés par d’autres en faisant attention à leurs broches. Même si ce n’est pas obligatoire ici, il est conseillé que les 2 transistors T2 et T3 soient des modèles complémentaires; c’est-à-dire que leurs caractéristiques soient identiques. Les paires BC337 et BC327 sont complémentaires, les paires 2N3904 – 2N3906 et 2N2222 – 2N2907 aussi.
T1 : BC547, BC548, 2N2222, PN2222 (broches inversées), 2N3904 (broches inversées)
T2 : BC337, 2N2222, PN2222 (broches inversées), 2N3904 (broches inversées)
T3 : BC327, 2N2907, 2N3906 (broches inversées)
On préfèrera les modèles 2N2222 et 2N2907 en boitier métal (TO18) pour une meilleure dissipation.
Conseil
Il ne faut pas hésiter à tester le montage sur une plaque d’essai. Cela permet de tester divers transistors pour chercher ceux qui ont le meilleur gain. En fonction des transistors choisis et en changeant les résistances, il faut régler la tension entre les transistors T2 et T3 à la moitié de la tension d’alimentation.
Bilan pratique
Pendant le mois de septembre 2016, 80 étudiants (en binôme) ont réalisés ce montage en 3h, avec une explication préalable de 45mn. Le résultat est très positif, puisque 95% des étudiants ont fini et testé cet amplificateur sur leur smartphone.
Pour certaines marques de smartphone, il n’a pas été possible d’utiliser le câble avec une prise jack un peu trop large. Mais en utilisant une liaison Bluetooth, leur montage a pu être testé aussi.

 Ce montage est un projet réalisé en 12h. Il s’agit d’un des mini projets proposés en ERS2 (Étude et Réalisation 2ème semestre GEII).
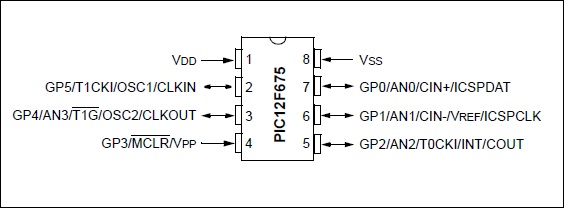
Ce montage est un projet réalisé en 12h. Il s’agit d’un des mini projets proposés en ERS2 (Étude et Réalisation 2ème semestre GEII).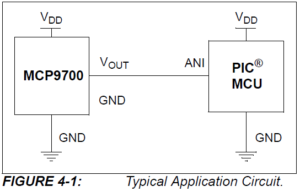 Le schéma électronique est inspiré de celui proposé par le fabricant Microchip du capteur MCP9700. Mais il est amélioré par les indications et améliorations proposées par le constructeur.
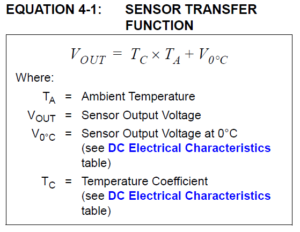
Le schéma électronique est inspiré de celui proposé par le fabricant Microchip du capteur MCP9700. Mais il est amélioré par les indications et améliorations proposées par le constructeur.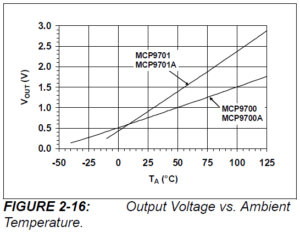
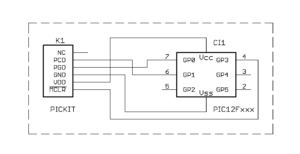
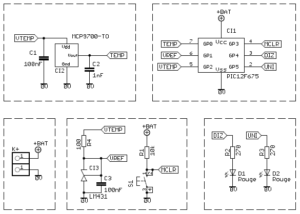 Pour réduire la consommation au maximum et obtenir une autonomie maximale, le capteur de température et la référence de tension sont alimentés par le microcontrôleur. Lorsque le système est en veille, la consommation tombe à moins de 1µA, soit une autonomie supérieur à 30ans avec une pile CR2430.
Pour réduire la consommation au maximum et obtenir une autonomie maximale, le capteur de température et la référence de tension sont alimentés par le microcontrôleur. Lorsque le système est en veille, la consommation tombe à moins de 1µA, soit une autonomie supérieur à 30ans avec une pile CR2430.