
 L’année scolaire 2022/2023 a été l’occasion de revoir nos bases en robotique avec l’étude, la réalisation et la programmation d’un Robot Suiveur de Ligne (RSL), Line Follower Robot (LFR). Le tournoi national de robotique de Nîmes est l’opportunité de motiver les étudiants pour concourir et performer.
L’année scolaire 2022/2023 a été l’occasion de revoir nos bases en robotique avec l’étude, la réalisation et la programmation d’un Robot Suiveur de Ligne (RSL), Line Follower Robot (LFR). Le tournoi national de robotique de Nîmes est l’opportunité de motiver les étudiants pour concourir et performer.
Le cahier des charges imposé par le tournoi donne les dimensions maximales du robot, le fait qu’il soit nécessaire de contourner un obstacle et enfin d’être capable de suivre un mur en virage en l’absence de piste. Ce qui correspond à 3 qualifications de complexité croissante. Nous avons respecté chronologiquement cette progression dans la construction de nos robots.
10 réalisations ont permis de tester plusieurs formes avec des dispositions diverses des moteurs et des capteurs.
Quelques choix ont été contraint par soucis de pédagogie.
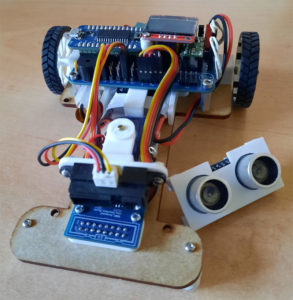
- Les moteurs de type Pololu 1/30
- Les roues adaptées
- Une interface Pololu DRV8835
- Un µC 18F26K22
- Un afficheur OLED I2C
- Un capteur de ligne QTR8A
- Un télémètre Sharp ou Ultrasons
- Un micro-servo 9G
- Interface Bluetooth à RN42
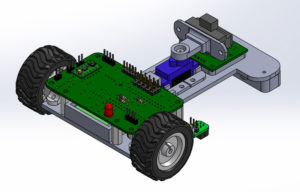
Les divers éléments structurels ont été dessinés sur SolidWorks et réalisés avec une imprimante 3D et une découpe LASER. Le circuit imprimé a été dessiné sous EAGLE. L’association a été validé sous SolidWork.
La phase de programmation a aussi permis de valider certaines structures au détriment d’autres. Le test sur piste a permis aussi de confirmer l’efficacité des diverses routines logicielles comme le calcul du barycentre ainsi que la correction PD.
L’interface Bluetooth associée à une appli pour smartphone de type Serial Bluetooth Terminal permet modifier les coefficients du correcteur PD, en direct sur le robot pendant qu’il roule. Le contrôle du robot avec un smartphone et son amélioration est une révélation pour beaucoup d’étudiants et donne un effet très positif sur le projet et sa finalité pédagogique.