

Plaque d’essai installée
la 2ème partie du projet va consister à réaliser une plateforme mobile de type différentielle à deux moteurs capable de suivre une ligne noire sur fond blanc.
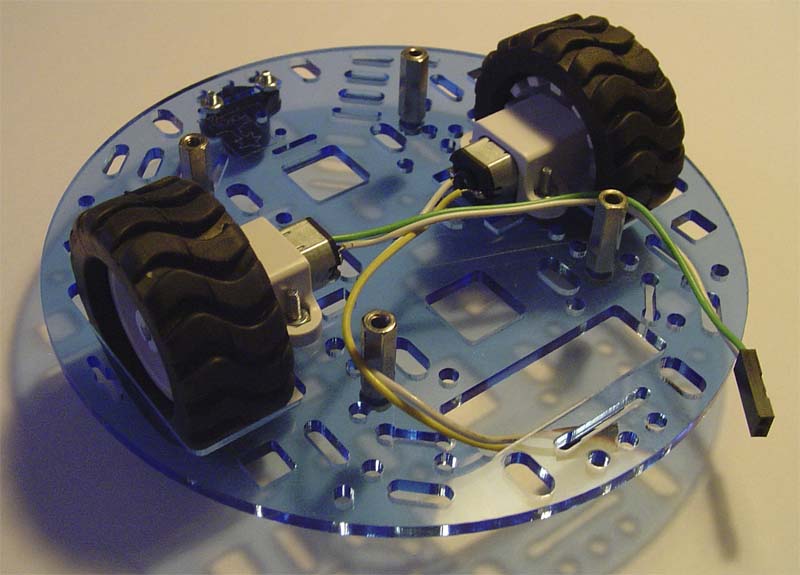
La partie mécanique est un châssis de marque Pololu réf : RRC04A. Il est fourni avec deux moto-réducteurs 1/30, deux roues 42mm de diamètre et un roue folle. Une fenêtre à l’avant du robot nous permet de placer la carte capteurs.
Lien vers le revendeur : Lextronic
Dans cette 2ème partie, il faut câbler un robot suiveur de ligne et réaliser une carte mère le robot labyrinthe, sans oublier la programmation de l’ensemble.
Dessin des circuits imprimés :
Carte Alim. LabDec : Alim-LabDec.pdf
Carte capteurs : Capteur V2.0.pdf
Carte à µC 16F88 : Carte µC 16F88 V2.pdf
Carte mère : Carte mere.pdf
Carte mère, fichier *.scr pour Eagle : LMR_2011.zip Ce fichier est à décompacter et à lancer (commande SCR, Script) lorsque le schéma de la carte mère est fini et lorsque vous passerez sur Board pour dessiner les pistes. Voir en pages Eagle, pour utiliser les scripts.
-

- Chassis nu

-

- Moteurs cablés
-
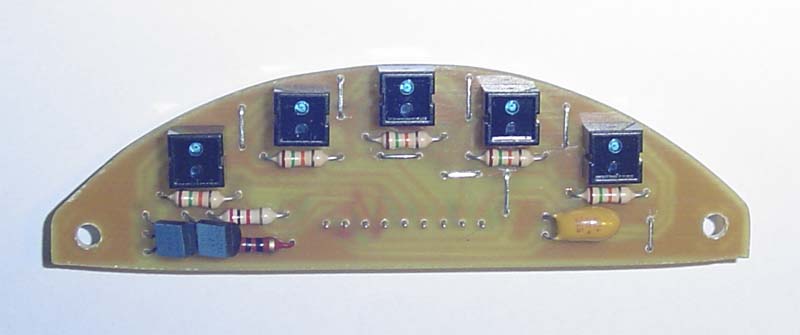
- Carte Capteurs
-

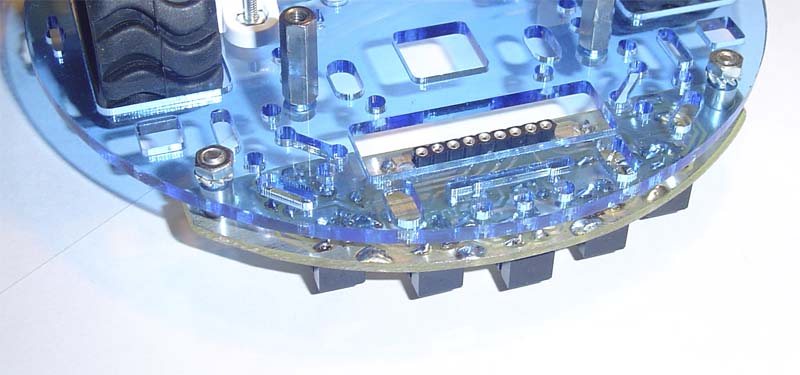
- Le connecteur de la carte capteurs
-

- la carte capteurs à l’avant
-

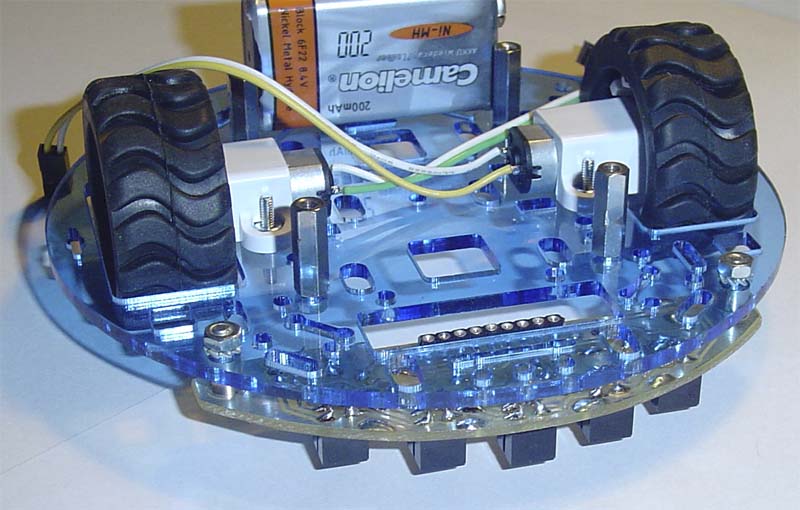
- Le support LabDec bloque l’accumulateur 9V

-
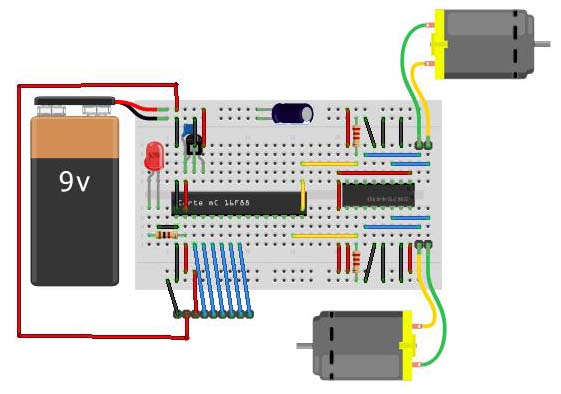
- Implantation sur plaque d’essai
-

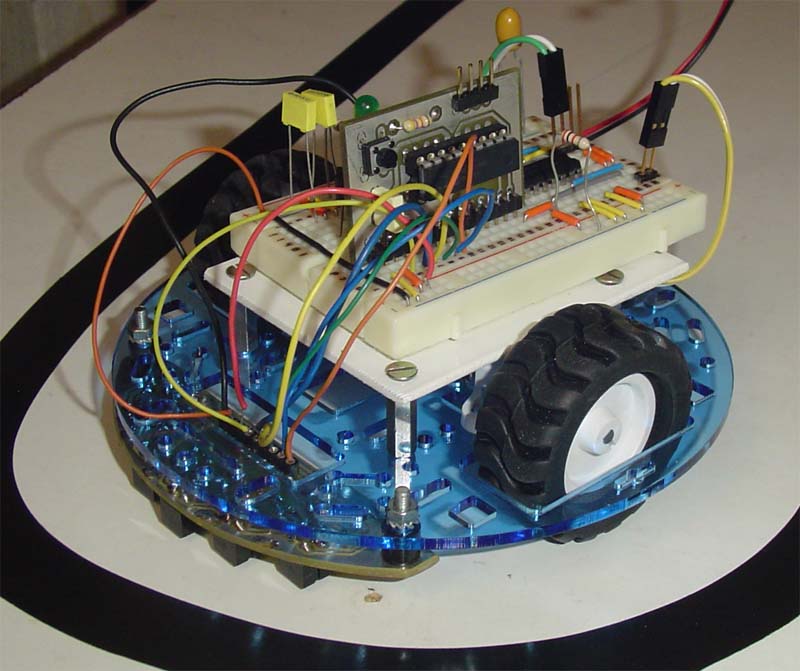
- Plaque d’essai installée
Nous avons commencé par monter la base du robot avec la plaque principale, les deux moto réducteurs, les deux roues et la roue folle à l’arrière. Puis nous avons soudé deux fils d’une dizaine de cm sur chacun des moteurs avec un connecteur femelle standard. La carte capteurs a été réalisée et testée avant d’être fixée à l’avant du montage. Le connecteur est accessible par un large fenêtre à l’avant du châssis.
La plaque d’essai va nous permettre de tester le fonctionnement du robot en suiveur de ligne, avec trois capteurs seulement, (voir vidéo: Suiveur_Ligne_01).
Les premiers essais sont encourageants. Mais il faut absolument disposer d’un accu pleinement chargé au risque de modifier inutilement les réglages des vitesses dans les virages.
A suivre…